- Camera Calibration(카메라 캘리브레이션) 이란?
기하 카메라 보정은 카메라 절제(camera resectioning)라고도 하며, 영상 또는 비디오 카메라의 렌즈 및 영상 센서에 대한 파라미터를 추정합니다. 이러한 파라미터를 사용하여 렌즈 왜곡을 수정하거나, 세계 단위로 객체의 크기를 측정하거나, 장면에서 카메라의 위치를 결정할 수 있습니다. 이러한 작업은 객체를 검출하고 측정하는 머신 비전과 같은 응용 사례에 사용됩니다. 또한 로보틱스, 내비게이션 시스템 및 3차원 장면 복원에도 사용됩니다.
카메라를 보정한 후 수행할 수 있는 작업의 예는 다음과 같습니다.
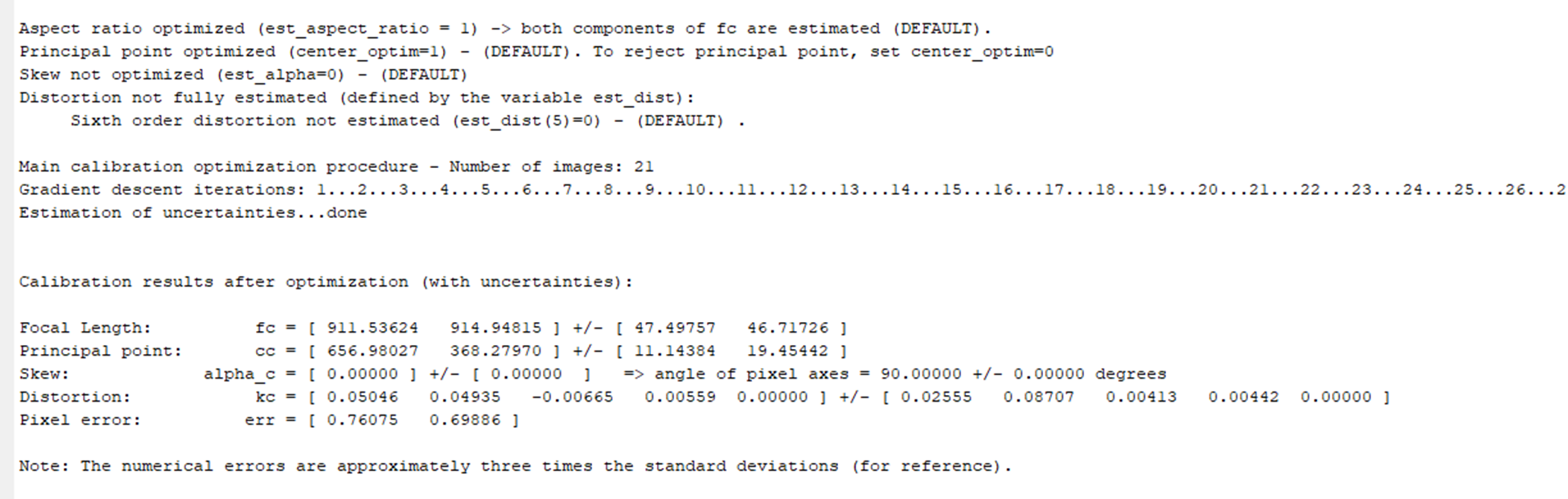
카메라 파라미터로는 내부 파라미터, 외부 파라미터, 왜곡 계수가 있습니다. 카메라 파라미터를 추정하려면 3차원 세계 점과 그에 대응되는 2차원 영상 점이 있어야 합니다. 체커보드와 같이 보정 패턴을 나타내는 여러 영상을 사용하여 이러한 대응점을 얻을 수 있습니다. 대응점을 사용하면 카메라 파라미터를 구할 수 있습니다. 카메라를 보정한 후 추정된 파라미터의 정확도를 평가하기 위해 다음 작업을 수행할 수 있습니다.
- 카메라의 상대적인 위치와 보정 패턴을 플로팅합니다.
- 재투영 오차를 계산합니다.
- 파라미터 추정 오차를 계산합니다.
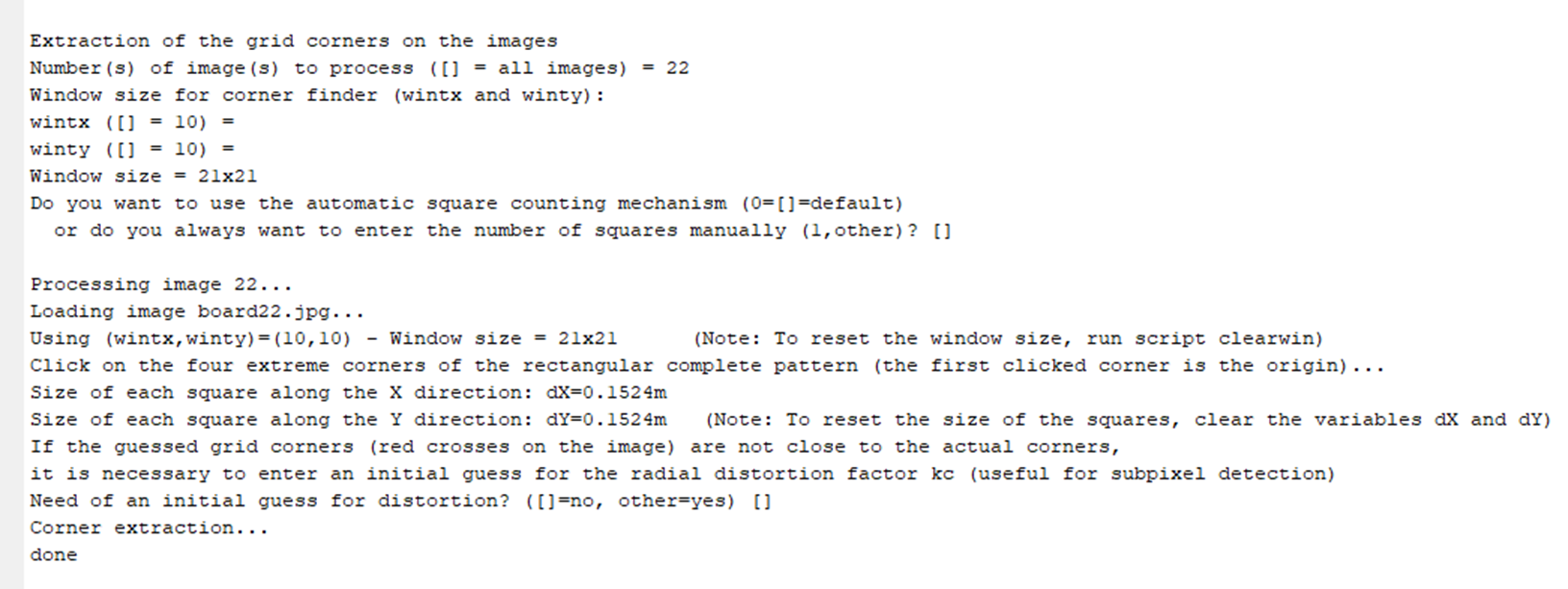
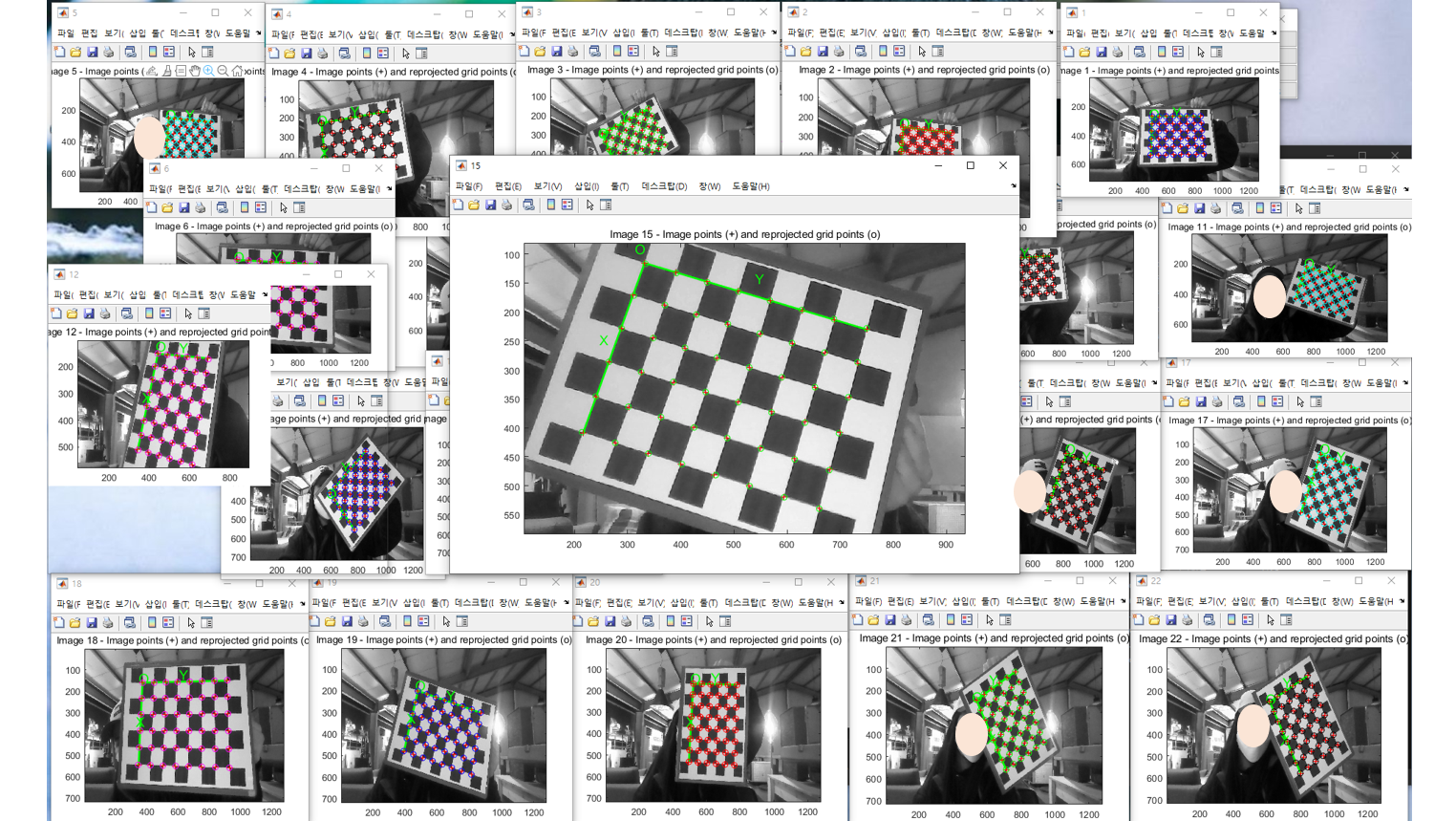
총 22개의 이미지로 데이터를 누적시킨 후, Callibration을 진행하였다.
1번(수동)이 아닌, 자동으로 모서리를 인식하도록 설정했다.


'AI > Deep Learning' 카테고리의 다른 글
| 인하대학교 공학대학원 인공지능융합 전공 공학석사 졸업했어요 (0) | 2025.02.14 |
|---|---|
| 서울/수도권 인공지능 대학원 9군데 지원 및 합격 후기 (0) | 2022.01.19 |
| [머신러닝] 사이킷런(sklearn)의 DecisionTreeClassifier(결정트리분류기)이란? (0) | 2021.12.10 |
| [Kaggle] Python으로 런던 자전거 수요 예측해보기 :: (4) 시그마 이상치 제거 (0) | 2021.06.01 |
| [Kaggle] Python으로 런던 자전거 수요 예측해보기 :: (2) (0) | 2021.06.01 |


